fixing observation bug after resetting envs #53
Conversation
|
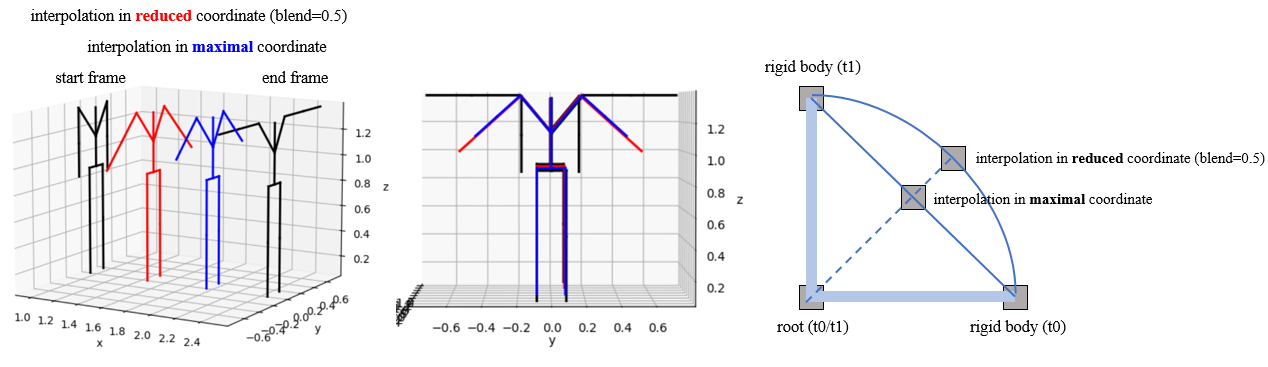
Thanks a lot for submitting this fix! I think your method is reasonable, but it might not give the right positions and velocities for the rigid bodies. It looks like you are computing the positions and velocities at each of the keyframes in the motion data, and then directly interpolating those in order in order to get the pos and vel at an intermediate time. But linear interpolation will not necessarily give you the right values, because the relationship between joint rotations and rigid body positions/vel is nonlinear. I think the correct way to calculate the pos and vel at an intermediate timestep is to first compute the interpolated reduced coordinate pose + vel of the character, and then calculate the maximal coordinate positions and velocities from the interpolated pose + vel. But this can get pretty expensive. Though what you have is certainly between than what's currently in the code. But I'm not sure if we should merge it now, since it is still not quite correct. |
|
Thank you for pointing out this mistake! The correct way to calculate the pos and vel at an intermediate time is indeed to first interpolate them in reduced coordinate space and then transform to maximal coordinate space. Using current codebase, it is easy to do this for computing right global 3D positions for the rigid bodies. I have implemented it in the latest commit. A simple example is shown in the figure below. For computing right global 3D linear velocities, I have not yet found a proper way. Although there are still some problems with the linear velocity calculation, we have been able to obtain better observations than before. I think the current method is already able to meet the needs of some users. It works well in my project.
|
Now we can get correct observations for both policy and discriminator after resetting environments!
All reset methods (default, reference, and fall) are fixed.